On this page
In the previous post we told the story of how the new smoke verifier for Pyronear was selected: a literature survey, five candidate models, one leaderboard, one winner with 4× fewer false alarms. This post opens up the winner itself — the bbox-tube temporal model (bbox for the bounding boxes a detector draws around candidate smoke, tube for the way those boxes are linked across frames) now released as a versioned package — and walks through how it judges a sequence of camera frames, stage by stage, with figures computed from real wildfire sequences.
The hard case
Pyronear cameras watch the horizon and capture a frame roughly every 30 seconds. This is what an early wildfire usually looks like from 30 kilometers away (red box = detection, orange box = the crop window we’ll come back to):

The full frame looks empty. A faint grey wisp a few pixels wide is everything there is to see — and clouds, fog banks, dust, and sun glare produce wisps just like it. Judged one frame at a time, this problem is genuinely hard, and pushing a single-frame detector to catch plumes this small means accepting a flood of false alarms.
But crop to the candidate region and lay the same sequence out over time:

Now it’s unmistakable. The puff appears, thickens, and drifts — anchored to one spot on the terrain. Clouds scud, fog banks roll, dust settles; smoke grows from a fixed point. That is the one signal a look-alike can’t fake, and it only exists across frames. Smoke is a behavior, not an appearance.
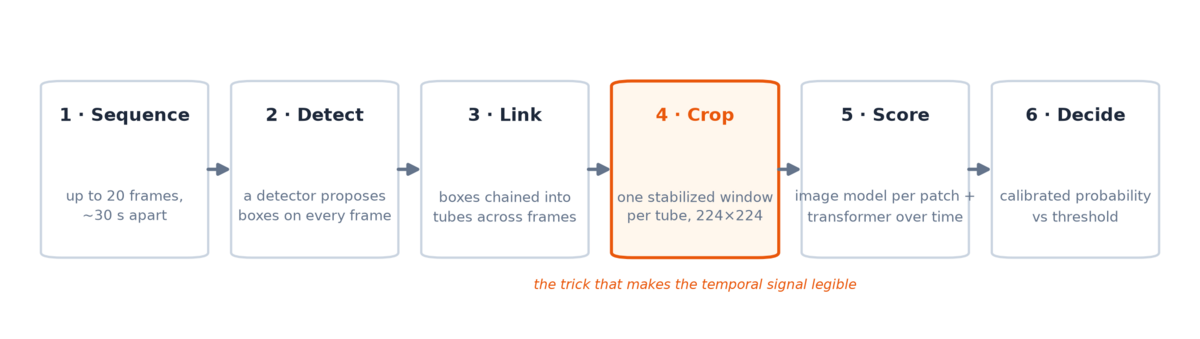
The temporal model is built to read exactly that behavior. Here is the whole pipeline, then each stage in turn:
Detect: propose first, judge later
A YOLO detector — “You Only Look Once”, a family of fast object detectors that draw bounding boxes around what they find in a single image — is bundled inside the released model package, its weights hash-stamped in the manifest. It runs over every frame of the sequence with deliberately permissive settings: a low confidence threshold and a high inference resolution, because distant plumes need both sensitivity and pixels.

False positives are expected and tolerated here. A cloud edge or a dust patch may well get a box — the detector’s job is only to nominate candidates. Recall is cheap at this stage; precision is the next stages’ job. This division of labor is what frees the system from the single-frame trade-off: the detector no longer has to be right, only thorough.
Link: detections become tubes
The classifier needs a temporally ordered view of one candidate plume. So detections are chained across frames into tubes — one tube ≈ one spatial region tracked over time. The tracking itself is simple greedy matching: a detection that overlaps an active tube’s last box (by intersection-over-union) extends that tube; an unmatched detection starts a new one; a tube that goes unmatched for too many frames is terminated.
Raw tubes are messy, so three cleanup passes follow:
- Filter — tubes that span too few frames, or contain too few real detections, are dropped. One-frame flickers die here.
- Merge — the detector sometimes fragments one plume into several tubes: the box splits, drifts, or drops out and re-appears. Tubes that are close in time and co-located in space are fused into one.
- Interpolate — frames where the detector lost the object get a synthetic box, linearly interpolated between the nearest real detections, and flagged as such.
Here are all three passes acting on a real sequence — each row is a candidate tube, each dot a detection:
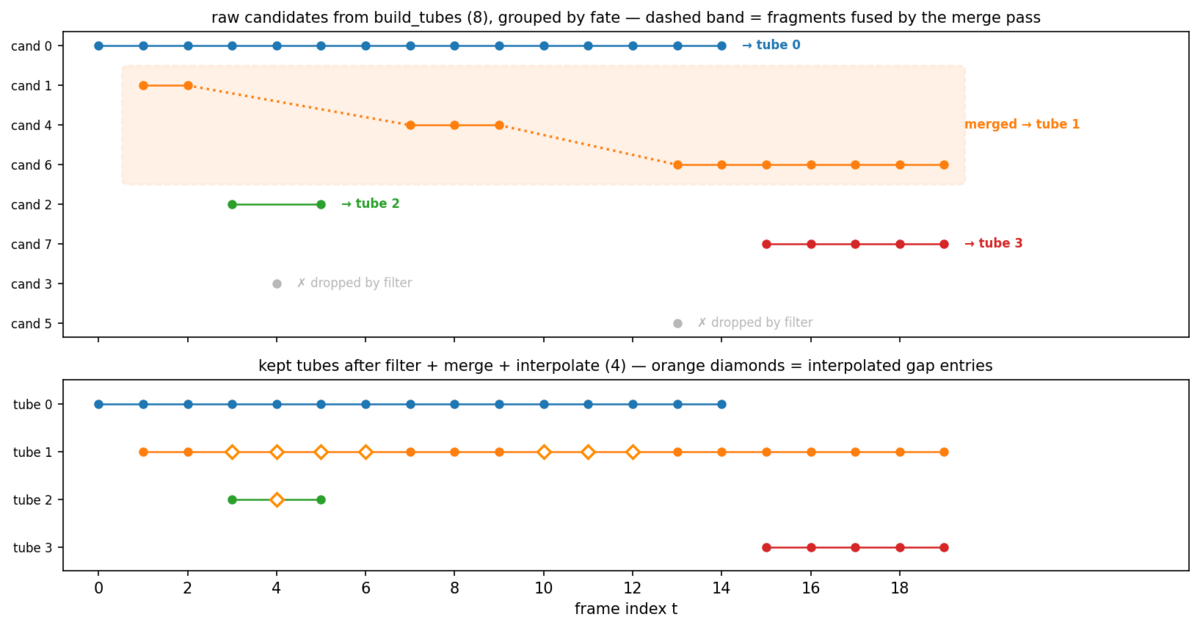
The tracker initially sees one plume as three fragments — the detector dropped it twice. The merge pass recognizes them as the same plume and fuses them into a single tube spanning the whole sequence, while the single-frame flickers (gray) never make it past the filter. And here is why interpolation matters — the crops along the merged tube, green borders for real detections, orange for interpolated boxes:

The smoke never actually disappears — YOLO simply lost it for a few frames. The interpolated boxes keep cropping the same spot, so the classifier’s view of the plume stays continuous until the detector re-acquires it. Without merging and interpolation, this would have been three short, weak tubes instead of one long, confident one.
Crop: hold the camera still
For each tube, every frame is cropped to a square patch around the candidate region. The obvious way to do this is to crop each frame to its own detection box. It looks like this:

The detection box grows and shifts with the plume, so the framing re-zooms and pans on every frame. The camera is bolted to a mast — yet the background appears to move. Almost all of the frame-to-frame change in these patches is cropping artifact, not smoke. That is noise injected directly into the one signal a temporal model is supposed to read: motion.
The fix is the quiet centerpiece of the whole pipeline: one fixed crop window for the entire tube — the union of all its boxes, expanded for context (smoke is judged relative to its surroundings: horizon, terrain, nearby clouds), squared off, and used to crop every frame identically.

Same tube, same frames, stabilized — this is the actual classifier input:

The hillside now holds still, and the only thing left moving is the smoke. Whatever the classifier learns about change over time, it will be learning about the plume — not about the cropping.
Score: what is it, and how does it evolve?
The classifier splits the question in two — what is in each patch? and how does it change over time? — and assigns each half to the architecture best suited for it:
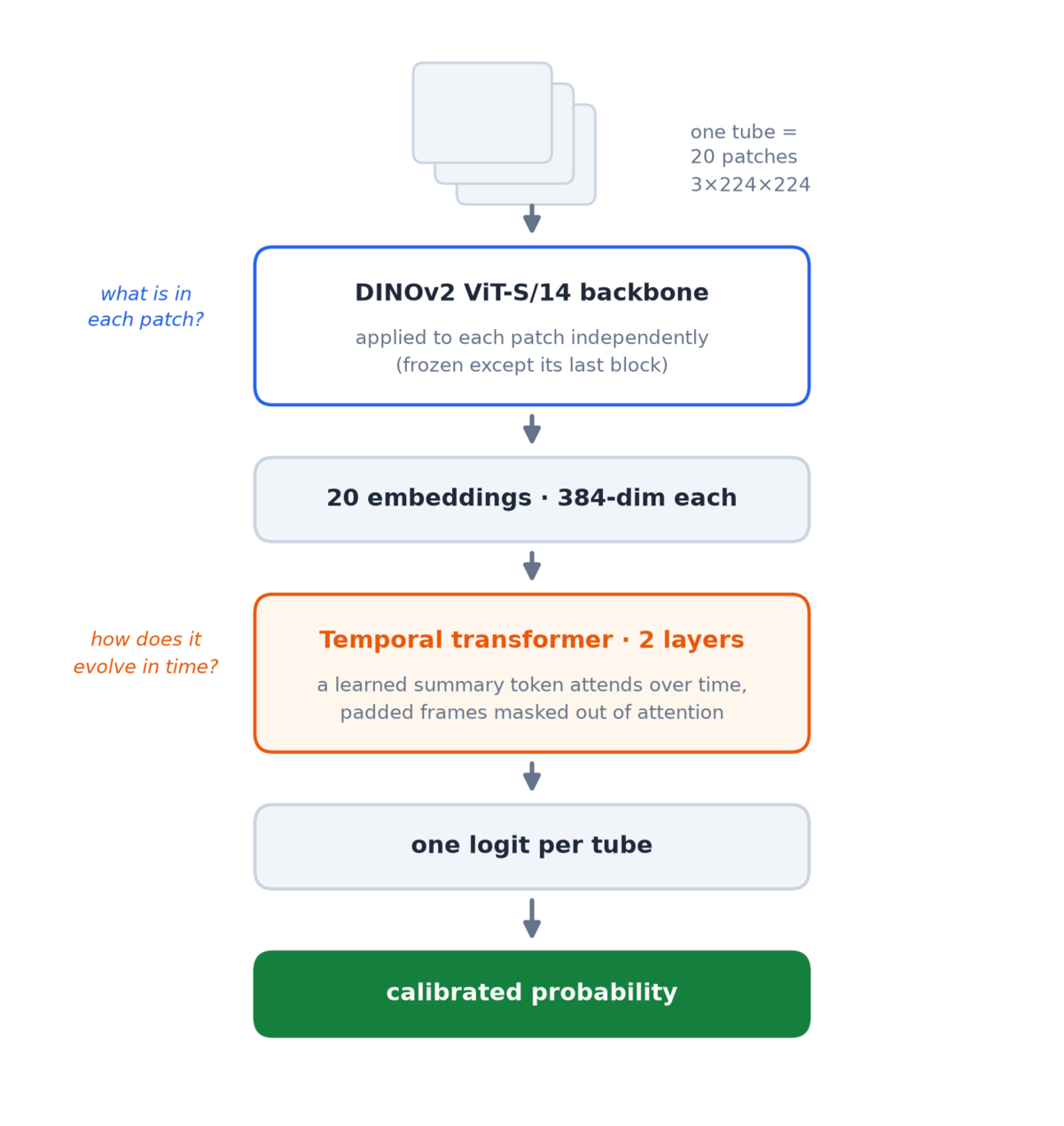
Each patch independently goes through a DINOv2 Vision Transformer (the “ViT” in the diagram) — a backbone pre-trained by self-supervision on 142 million images, frozen during training except its last block, just enough to adapt its general visual features to smoke textures without overfitting a small dataset. Each patch becomes a single 384-dimensional embedding. The whole tube — megabytes of pixels — is now twenty vectors.
Here is that matrix for the tube above, frames down the side, embedding dimensions across:
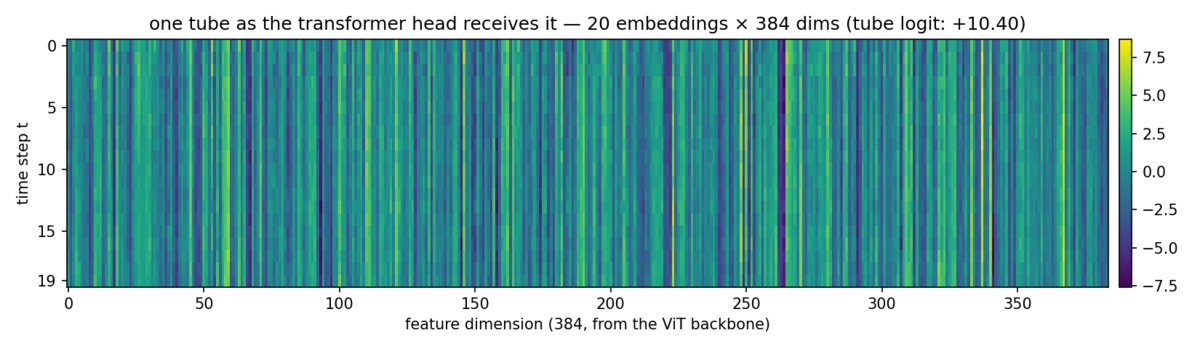
The vertical striping is the stabilization paying off, made visible: dimensions encoding the static scene stay nearly constant down each column, so whatever varies along the time axis is the plume. A small two-layer transformer attends over exactly that variation (padded slots for short sequences are masked out of attention) and reduces the tube to one logit — a single raw, unbounded score, positive for smoke. For this tube it answers +10.4 — unambiguously smoke.
Decide: a logit is not a verdict
A raw score ignores context that obviously matters: the same logit on a two-frame tube is much weaker evidence than on a fifteen-frame tube. So the final stage is a deliberately tiny logistic regression that converts each tube’s logit into a calibrated probability using three extra features: the tube’s length (longer tubes are trusted more), its mean detection confidence (consistent detections are trusted more — and since interpolated gap boxes carry confidence zero, a tube the detector kept losing is automatically discounted), and the number of tubes in the sequence (busy scenes are trusted less).
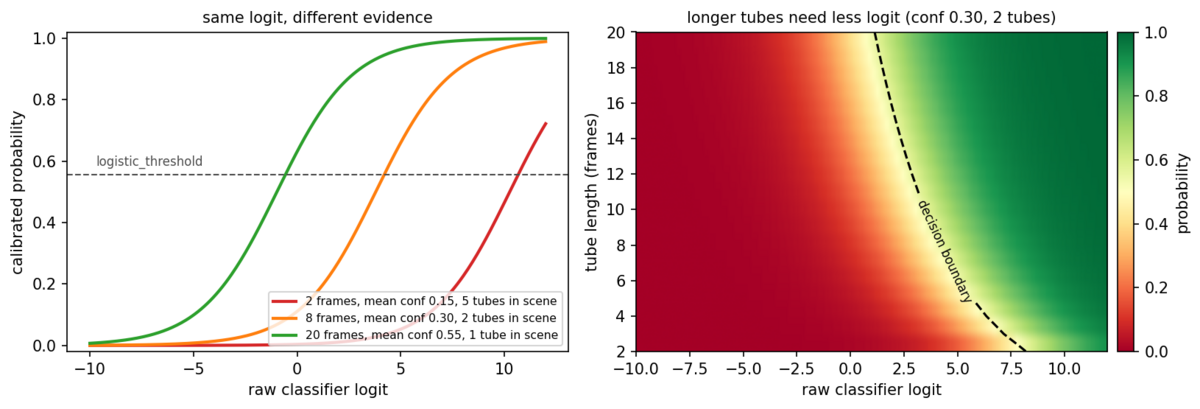
The left panel shows the same raw logit converting to very different probabilities depending on the tube behind it: a long, consistently-detected, lone tube (green) crosses the decision threshold at a far lower logit than a two-frame flicker in a busy scene (red). The right panel shows the resulting decision boundary — the longer the tube, the less the classifier’s score has to carry on its own. The threshold itself is picked on the validation set at packaging time to hit a target recall: missing a real fire costs more than a false alarm, and the calibration encodes that asymmetry explicitly.
The sequence raises an alert if at least one tube crosses the threshold.
How fast would it have fired?
For evaluation, the model can replay each positive tube prefix by prefix and report the earliest frame at which the decision would have crossed the threshold. That number — frames × 30 seconds — is the time-to-detection, and it is the honest cost of waiting for temporal evidence: on the leaderboard’s test set, the model needs a median of two frames, roughly one minute of watching, before it has seen enough growth to be sure. For the 4× reduction in false alarms it buys, that is a trade fire departments take gladly.
Everything ships in one zip
The released package is self-contained: the YOLO weights, the classifier
checkpoint, the calibrator coefficients, and the full configuration —
every threshold and parameter named in this post — travel together in a
single versioned model.zip, stamped with the training git SHA. Loading it
restores the exact training-time configuration; there are no hidden defaults
shared between training and serving. The
FastAPI service that serves it
caches per-frame detections across calls, so a camera streaming overlapping
sequences only pays detection cost for frames it hasn’t seen.
All the figures in this post were generated from real sequences with the released model — the illustrated technical documentation goes one level deeper, down to the functions and config keys, and every figure is regenerable from the scripts checked in next to it.
Try the interactive demo
See the model in action right in your browser — try it on the built-in examples or your own data. No install, no setup.
Open the demoThis work is part of our ongoing collaboration with Pyronear — read how the model was selected, or get in touch if your conservation organization needs applied ML R&D.