On this page
In this post, we’ll walk through the development of an early forest fire detection system, built in collaboration with the NGO Pyronear.
Our detectors communicate fire alerts to a database that is connected to a supervision platform for the fire department.
– Pyronear
Pyronear takes a whole-system approach to fire risk. At its core is an early wildfire detection algorithm that runs on a compact microcomputer, fed by a network of high-resolution cameras mounted at high vantage points for panoramic coverage of the forest. Together they form a proactive line of defense against wildfires.
Installed on antenna towers, the system continuously watches the forest through these cameras. When it detects smoke in a feed, it raises an alert; the fire department reviews it and can act immediately.
 Overview of the Pyronear system to monitor forests around the clock
Overview of the Pyronear system to monitor forests around the clock
The video below, filmed in the Forest of Fontainebleau, shows the system end to end — from the cameras catching the first wisps of smoke to the alert reaching the fire department.
A walk through the full Pyronear pipeline, filmed in the Forest of Fontainebleau
Project Scope
Our collaboration focuses on improving the accuracy of their machine learning system for early forest fire detection. Our goal is to minimize false alarms, thereby increasing confidence among firefighters and enhancing the model’s precision. Additionally, we are putting sound engineering and MLOps practices in place for long-term reliability.
 Overview of the embedded ML system
Overview of the embedded ML system
Our work concentrates on the software component responsible for analyzing input from the cameras.
Covered sites
 The camera system covers a full 360-degree view
The camera system covers a full 360-degree view
The cameras are configured to provide a full 360-degree coverage. Mounted on tall antennas, the system is capable of detecting fires from distances of 30 to 60 kilometers. Below is the Brison site, where four cameras work in unison to achieve complete 360-degree coverage.




Datasets
Pyronear compiled its dataset by developing a custom web scraper, designed to collect videos of wildfires from a network of surveillance cameras. These videos were manually enhanced with bounding-box annotations to highlight areas of interest. The dataset was then filtered using a strategy aimed at improving both the quality and diversity of the images, resulting in a final set of 10,000 carefully selected frames.
At the heart of the data collection process is an automated scraping script that interfaces with the AlertWildfire API. This script retrieves images from each camera at regular intervals, capturing one image per minute as configured by AlertWildfire.
For a more detailed overview of the data collection process, refer to Pyronear’s published paper here.
Primary Sources
HPWREN
A non-commercial, wide-area wireless network of Pan-Tilt-Zoom (PTZ) cameras across Southern California, funded by the NSF — used for network research and wildfire detection.
ALERTWildfire
A university consortium across the western U.S. providing PTZ fire cameras and public live feeds, supporting firefighters across Washington, Oregon, Idaho, California, and Nevada.
Derived Datasets
SmokeFrames
~50,000 images from ALERTWildfire cameras (Schaetzen et al., 2020). The SmokeFrames-2.4k subset adds 2,410 images across 677 sequences, with plenty of false positives for robustness.
Nemo
Frames from raw ALERTWildfire PTZ videos (Yazdi et al., 2022), covering many stages of fire and smoke progression.
Fuego
HPWREN images annotated from Cal Fire records (Govil et al., 2020) — 8,500 reported, 1,661 publicly available, focused on early fire stages.
AiForMankind
Two annotated smoke-detection and segmentation datasets, merged from AI For Mankind hackathons (2023).
FIgLib
The Fire Ignition Image Library (Dewangan et al., 2022): 24,800 images of 315 fires in Southern California from HPWREN — the reference dataset for fire-ignition studies.
Synthetic
Computer-generated smoke overlaid onto landscape images to create synthetic wildfire scenarios.
Data Modeling
Dealing with False positives
The Pyronear system must detect early-stage wildfires with high accuracy (achieving a high recall) while minimizing false positives. If the system generates too many false alarms, firefighters may begin to disregard its alerts. Therefore, finding the right balance between recall and precision is critical for Pyronear to establish trust among stakeholders and ensure its reliability in wildfire detection.
Evaluation Metrics
We judge the detector with three standard metrics, all built from true positives (TP), false positives (FP), and false negatives (FN).
Precision — of everything the model flags as smoke, how much is real smoke? Fewer false alarms means higher precision.
\[ \text{Precision} = \frac{\text{TP}}{\text{TP} + \text{FP}} \]Recall — of the real fires in view, how many does the model catch? Missing fewer fires means higher recall.
\[ \text{Recall} = \frac{\text{TP}}{\text{TP} + \text{FN}} \]F1 score — the harmonic mean of the two: a single number that only stays high when precision and recall are both high.
\[ \text{F1} = 2 \times \frac{\text{Precision} \times \text{Recall}}{\text{Precision} + \text{Recall}} \]For Pyronear, recall must stay high — a missed fire is the worst outcome — while precision keeps false alarms rare enough that firefighters keep trusting the alerts.
YOLO
Overview
We took a pretrained YOLO model and fine-tuned it for our object detection task. YOLO is fast, accurate, and easy to work with, and it handles a range of tasks — object detection, tracking, instance segmentation, image classification, and pose estimation.
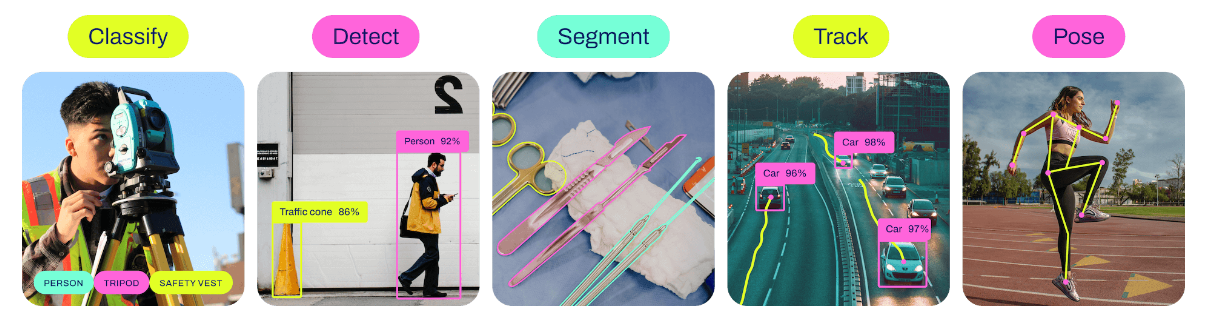 YOLO Computer Vision Tasks
YOLO Computer Vision Tasks
Random Hyperparameter Search
To efficiently identify an optimal combination of hyperparameters, we opted for random hyperparameter search across 12 hyperparameters for the YOLO models. This approach allowed us to explore a wide range of potential configurations without the exhaustive computations required by grid search.
Below is the Python code that defines the hyperparameter search space:
space = {
"model_type": np.array(["yolov8n", "yolov8s", "yolov8m"]),
"epochs": np.linspace(50, 200, 20, dtype=int),
"patience": np.linspace(10, 50, 10, dtype=int),
"imgsz": np.array([320, 640, 1024], dtype=int),
"batch": np.array([16, 32, 64]),
"optimizer": np.array(
[
"SGD",
"Adam",
"AdamW",
"NAdam",
"RAdam",
"RMSProp",
"auto",
]
),
# Learning rates
"lr0": np.logspace(
np.log10(0.0001),
np.log10(0.03),
base=10,
num=50,
),
"lrf": np.logspace(
np.log10(0.001),
np.log10(0.01),
base=10,
num=50,
),
# Data Augmentation
"mixup": np.array([0, 0.2]),
"close_mosaic": np.linspace(0, 35, 10, dtype=int),
"degrees": np.linspace(0, 10, 10),
"translate": np.linspace(0, 0.4, 10),
}
Random search samples configurations at random instead of walking a fixed grid. In high-dimensional spaces where only a few hyperparameters really matter, it finds good settings faster and scales far better — it spends its budget exploring each parameter’s range broadly rather than testing every combination exhaustively.
 Grid search samples a fixed lattice; random search covers each parameter’s range more densely (after Bergstra & Bengio)
Grid search samples a fixed lattice; random search covers each parameter’s range more densely (after Bergstra & Bengio)
Data Augmentation
To enhance the training set, we perform hyperparameter search on augmentation techniques such as rotation, translation, mixup, and mosaic. These augmentations help improve model robustness and performance.
 Data Augmentation: A combination of rotation, translation, mixup and mosaic
Data Augmentation: A combination of rotation, translation, mixup and mosaic
Training
A total of 100 training runs were executed in parallel on a GPU cluster. Each run randomly sampled a parameter configuration from the previously defined hyperparameter space.
Below is the best-performing YOLOv8 model, evaluated on the holdout test set:
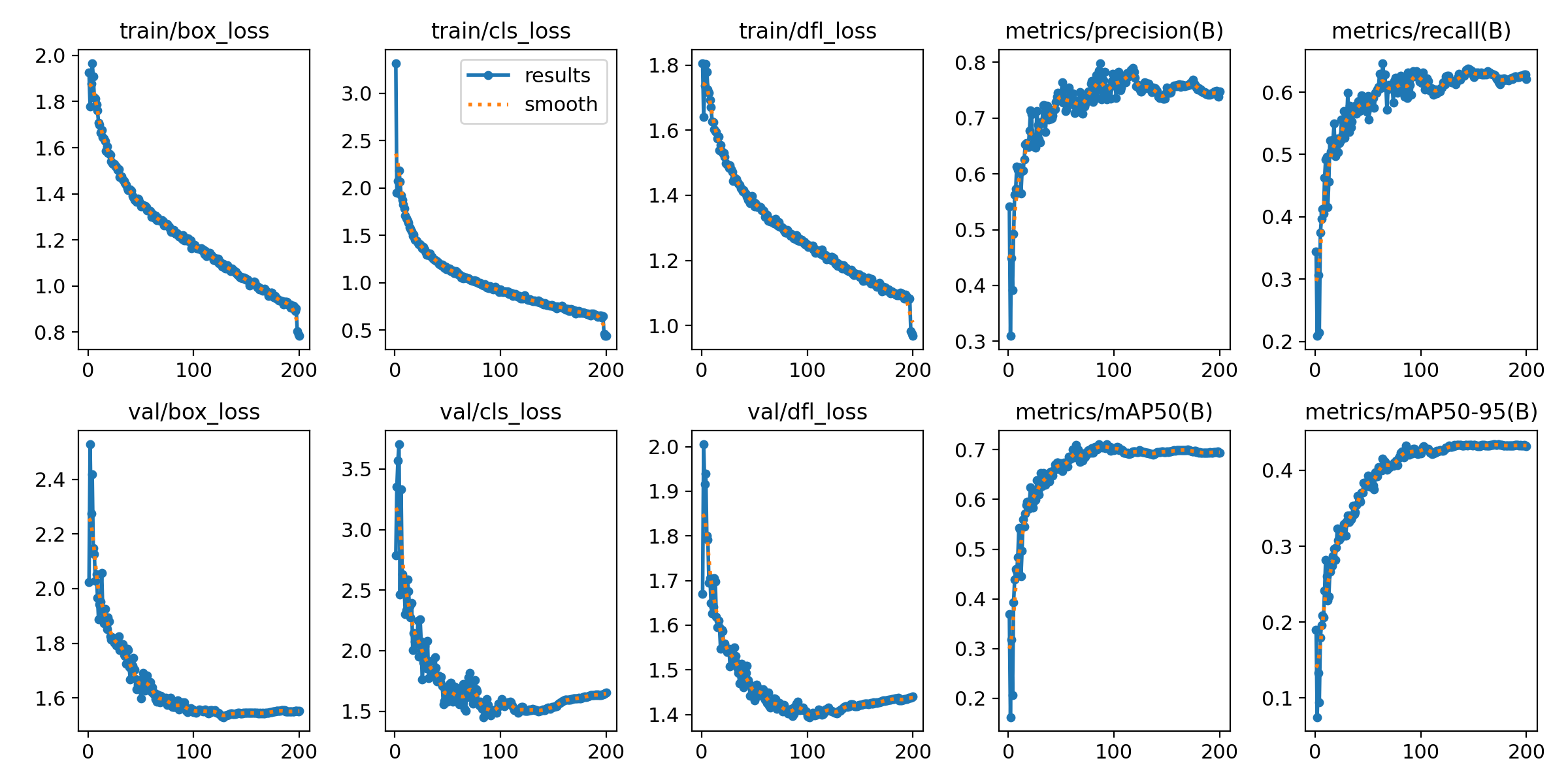 Training results of the best YOLOv8 model
Training results of the best YOLOv8 model
Versions 9 and 10 of YOLO were also tested using a similar approach, but neither demonstrated better performance compared to version 8.
Evaluation
On the holdout test set, the Pyronear team evaluated the model using the metrics outlined above. This model significantly outperformed previous versions and has been deployed to the Pyronear systems as the new best model.
| Precision | Recall | F1 Score |
|---|---|---|
| 0.922 | 0.898 | 0.910 |
Here is a qualitative look at the model on a random sample from the evaluation set.
| Ground Truth | Prediction |
|---|---|
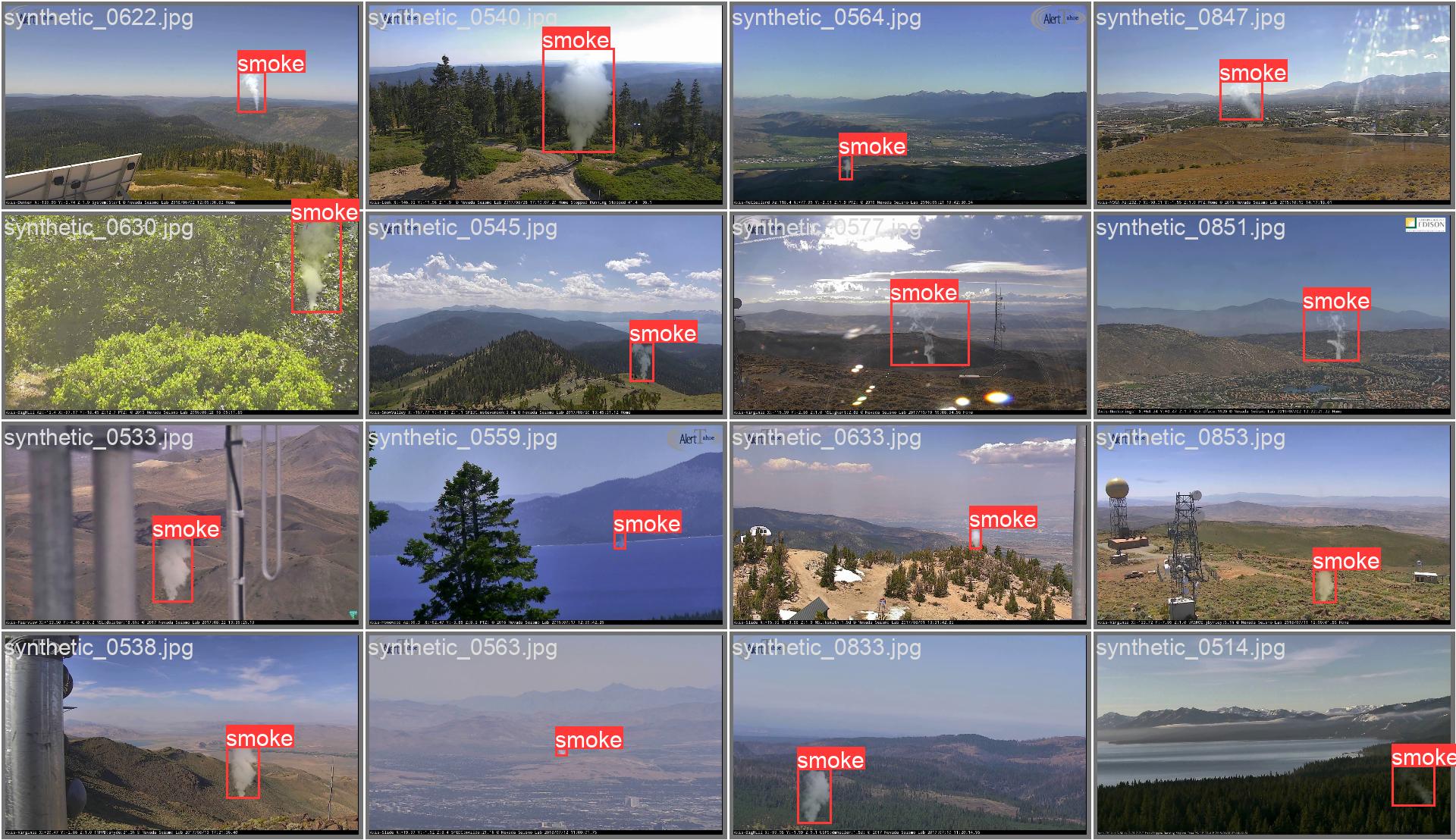
|
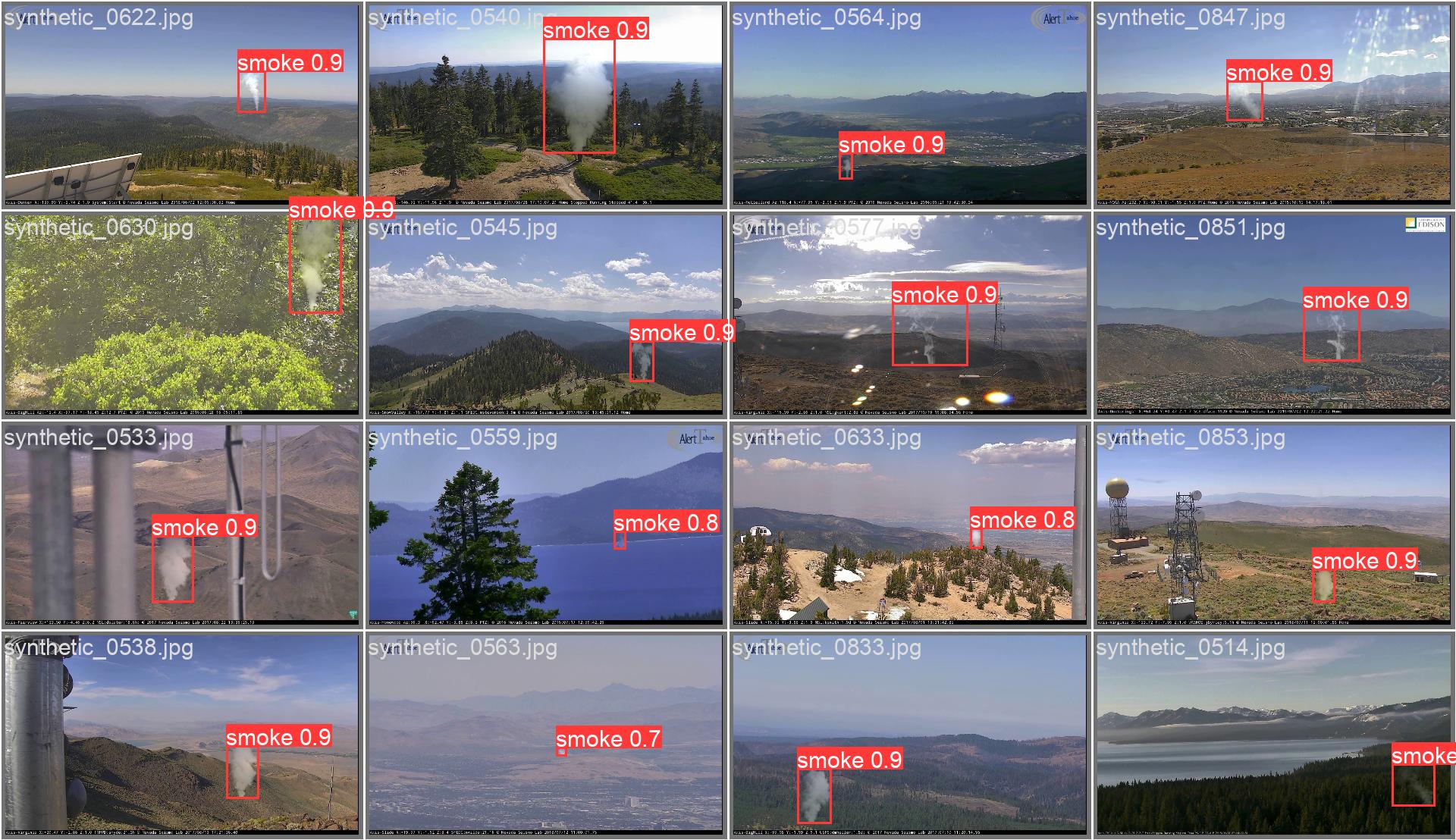
|
MLOps
Alongside improving Pyronear’s detection accuracy, the project put several MLOps practices in place. MLOps blends machine learning, software engineering, and DevOps to manage a model’s full lifecycle in production — keeping it reproducible, reliable, and improvable over time.
DVC
Managing a data-intensive project starts with a robust way to version and track the data itself.

DVC (Data Version Control) is an open-source tool designed to manage and version control machine learning datasets and models, much like how Git handles code. It enables users to track changes in data and experiments, ensuring that data pipelines are reproducible and that every stage of the pipeline can be reliably recreated. By integrating data versioning with the code, DVC helps maintain consistency and reproducibility throughout the ML development lifecycle.
Library Code and Scripts
All code for data processing, training, and evaluation lives in well-structured library files and scripts. We avoid Jupyter notebooks at this stage to keep the workflow reproducible, scalable, and maintainable.
Future development
The computer vision team at Pyronear is busy exploring ways to reduce false positives by leveraging temporal data. Often, low clouds can resemble early fire smoke in a single image frame, but analyzing a sequence of frames can make it easier to distinguish between them. We’ve since done exactly that — read how we raced the candidate models and how the temporal model reads smoke over time.
Additionally, the team is considering the development of models with varying hardware requirements. Due to limited network bandwidth, streaming all images or video feeds from the Pyronear system to a central server is not feasible. Implementing a smaller model with high recall on edge devices, alongside a larger, more precise model running on a server, could significantly enhance overall system performance. This approach, however, introduces added complexity in data synchronization in remote areas and server management.
Conclusion
This article details the technical implementations developed in collaboration with Pyronear. It covers the processes of dataset collection and curation, model training and evaluation, and the integration of MLOps practices, which established a solid foundation for future development. We are excited to see our contributions go live, with the system now actively detecting wildfires and helping to protect forests!
The model detects a forest fire in Fontainebleau from 35 kilometres away, in real time — a new record for the Pyronear systems.
You can try the detector yourself on real camera footage — the interactive demo runs the model right in your browser.
Try the interactive demo
See the model in action right in your browser — try it on the built-in examples or your own data. No install, no setup.
Open the demo